车路协同自动驾驶感知方法及装置与流程
本公开涉及无线通信网络,具体涉及自动驾驶感知数据传输、自动驾驶感知信息广播等,尤其涉及一种车路协同自动驾驶感知方法及装置,可应用于自动驾驶感知的场景下。
背景技术:
1、无线通信网络是一种通过无线电波传输信息的通信系统。无线通信网络广泛应用于各个领域,比如移动通信、物联网、自动驾驶、无人机、智能家居等。在自动驾驶领域,无线通信网络为车路协同自动驾驶感知提供了实时、可靠的信息交流基础。车路协同自动驾驶感知是将车辆的传感器数据与路侧单元的检测信息相融合,利用路侧单元来获取更全面、准确的感知信息的过程,可以为自动驾驶提供更为完整的感知和理解能力。
2、目前,车路协同自动驾驶感知的方式包括:车辆或车路两两交互进行感知、多车与路组网协同交互进行感知。
3、但目前的车路协同自动驾驶感知方式对通信吞吐量的要求较高,通信吞吐量不满足要求时,会严重影响自动驾驶感知的准确性。
技术实现思路
1、本公开提供了一种车路协同自动驾驶感知方法及装置,能够降低通信吞吐量,支持在通信吞吐量约束前提下的协同感知,提高自动驾驶感知的准确性。
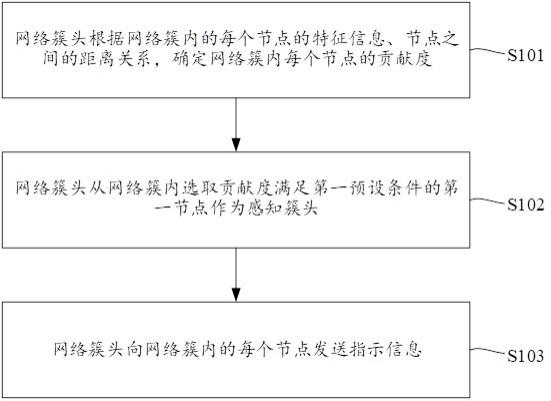
2、根据本公开的第一方面,提供了一种车路协同自动驾驶感知方法,所述方法包括:网络簇头根据网络簇内的每个节点的特征信息、节点之间的距离关系,确定网络簇内每个节点的贡献度,贡献度用于指示节点在网络簇内的协同感知能力的大小,网络簇包括至少两个节点,节点包括车辆和/或路侧单元,网络簇头为网络簇内的一个节点;网络簇头从网络簇内选取贡献度满足第一预设条件的第一节点作为感知簇头;网络簇头向网络簇内的每个节点发送指示信息,指示信息用于指示感知簇头的身份信息,且用于指示感知簇头按照预设周期广播自身的运动状态信息和传感器信息;其中,感知簇头广播的运动状态信息和传感器信息,用于网络簇内的每个节点进行自动驾驶协同感知。
3、一些可能的实现方式中,所述网络簇头根据网络簇内的每个节点的特征信息、节点之间的距离关系,确定网络簇内每个节点的贡献度,包括:网络簇头根据网络簇内的每个节点的特征信息和节点数量,构建特征矩阵;网络簇头根据网络簇内节点之间的距离关系和节点数量,构建关系矩阵;网络簇头根据特征矩阵和关系矩阵构建图神经网络;网络簇头确定网络簇内每个节点对图神经网络的贡献度,作为网络簇内每个节点的贡献度。
4、一些可能的实现方式中,所述网络簇头确定网络簇内每个节点对图神经网络的贡献度,包括:网络簇头获取网络簇内每个节点的特征值对于图神经网络的损失函数的偏微分值;网络簇头分别对网络簇内每个节点对应的偏微分值的绝对值进行求和,得到每个节点的偏微分和数,偏微分和数用于指示节点对图神经网络的贡献度。
5、一些可能的实现方式中,所述第一预设条件包括:贡献度大于或等于第一预设阈值,第一预设阈值为按照贡献度由高到低对网络簇内所有节点进行排序的结果中,位于第k位的节点的贡献度,k为大于0的整数。
6、一些可能的实现方式中,所述k的大小与网络簇的拥塞程度负相关。
7、一些可能的实现方式中,所述方法还包括:网络簇头获取网络簇的通信时延;网络簇头根据通信时延,确定网络簇的拥塞程度。
8、一些可能的实现方式中,所述网络簇头根据网络簇内的每个节点的特征信息、节点之间的距离关系,确定网络簇内每个节点的贡献度之前,所述方法还包括:网络簇头接收网络簇内的每个节点的运动状态特征信息和传感器特征信息;网络簇头分别将网络簇内的每个节点的传感器特征信息转化为一维向量后,将一维向量与运动状态特征信息进行融合,得到每个节点的特征信息。
9、根据本公开的第二方面,提供了一种车路协同自动驾驶感知方法,所述方法包括:第一节点接收来自网络簇头的指示信息,指示信息用于指示第一节点为感知簇头,网络簇头为网络簇中的一个节点,网络簇包括至少两个节点,节点包括车辆和/或路侧单元,第一节点为至少两个节点中的一个;第一节点响应于指示信息,按照预设周期广播自身的运动状态信息和传感器信息;其中,第一节点广播的运动状态信息和传感器信息,用于网络簇内的每个节点进行自动驾驶协同感知。
10、根据本公开的第三方面,提供了一种车路协同自动驾驶感知方法,所述方法包括:第二节点接收来自网络簇头的指示信息,指示信息用于指示第一节点为感知簇头,网络簇头为网络簇中的一个节点,网络簇包括至少两个节点,节点包括车辆和/或路侧单元,至少两个节点包括第一节点和第二节点;第二节点响应于接收第一节点广播的运动状态信息和传感器信息,根据第一节点广播的运动状态信息和传感器信息、第二节点自身的运动状态信息和传感器信息,进行自动驾驶协同感知。
11、一些可能的实现方式中,所述第二节点根据第一节点广播的运动状态信息和传感器信息和自身的运动状态信息和传感器信息,进行自动驾驶协同感知,包括:第二节点将第一节点广播的运动状态信息和传感器信息转换为第二节点的视角,得到转换视角后的感知信息;第二节点将转换视角后的感知信息与自身的运动状态信息和传感器信息进行融合,得到自动驾驶协同感知信息。
12、根据本公开的第四方面,提供了一种车路协同自动驾驶感知方法,所述方法应用于车路协同系统,车路协同系统包括至少两个节点,至少两个节点中包括默认通信节点,节点包括车辆和/或路侧单元,方法包括:默认通信节点根据自身与周边节点之间的通信距离,构建网络簇,网络簇包括至少两个节点;默认通信节点从网络簇内选取通信质量满足第二预设条件的目标节点作为网络簇的网络簇头;网络簇头根据网络簇内的每个节点的特征信息、节点之间的距离关系,确定网络簇内每个节点的贡献度,贡献度用于指示节点在网络簇内的协同感知能力的大小;网络簇头从网络簇内选取贡献度满足第一预设条件的第一节点作为感知簇头;网络簇头向网络簇内的每个节点发送指示信息,指示信息用于指示感知簇头的身份信息,且用于指示感知簇头按照预设周期广播自身的运动状态信息和传感器信息;感知簇头响应于指示信息,按照预设周期广播自身的运动状态信息和传感器信息;网络簇内的每个节点响应于接收到感知簇头广播的运动状态信息和传感器信息,根据感知簇头广播的运动状态信息和传感器信息、自身的运动状态信息和传感器信息,进行自动驾驶协同感知。
13、本公开的第一方面至第四方面,至少具备如下有益效果:可以从整体网络结构的角度选择感知簇头,由感知簇头向各个节点发送特征信息,仅在簇内网络初始化时要求全节点发送特征信息至网络簇头,避免了网络内所有节点周期性向目标车辆发送特征信息从而造成网络拥塞的情况,降低了通信吞吐量,同时能够支持在通信吞吐量约束前提下的协同感知,提高自动驾驶感知的准确性。
14、根据本公开的第五方面,提供了一种车路协同自动驾驶感知装置,所述装置包括:确定单元、选取单元、发送单元。
15、确定单元,用于根据网络簇内的每个节点的特征信息、节点之间的距离关系,确定网络簇内每个节点的贡献度,贡献度用于指示节点在网络簇内的协同感知能力的大小,网络簇包括至少两个节点,节点包括车辆和/或路侧单元,网络簇头为网络簇内的一个节点。
16、选取单元,用于从网络簇内选取贡献度满足第一预设条件的第一节点作为感知簇头。
17、发送单元,用于向网络簇内的每个节点发送指示信息,指示信息用于指示感知簇头的身份信息,且用于指示感知簇头按照预设周期广播自身的运动状态信息和传感器信息。
18、可选地,确定单元,具体用于:网络簇头根据网络簇内的每个节点的特征信息和节点数量,构建特征矩阵;网络簇头根据网络簇内节点之间的距离关系和节点数量,构建关系矩阵;网络簇头根据特征矩阵和关系矩阵构建图神经网络;网络簇头确定网络簇内每个节点对图神经网络的贡献度,作为网络簇内每个节点的贡献度。
19、可选地,确定单元,具体用于:网络簇头获取网络簇内每个节点的特征值对于图神经网络的损失函数的偏微分值;网络簇头分别对网络簇内每个节点对应的偏微分值的绝对值进行求和,得到每个节点的偏微分和数,偏微分和数用于指示节点对图神经网络的贡献度。
20、可选地,第一预设条件包括:贡献度大于或等于第一预设阈值,第一预设阈值为按照贡献度由高到低对网络簇内所有节点进行排序的结果中,位于第k位的节点的贡献度,k为大于0的整数。
21、可选地,k的大小与网络簇的拥塞程度负相关。
22、可选地,获取单元,用于获取网络簇的通信时延;确定单元,还用于:根据通信时延,确定网络簇的拥塞程度。
23、可选地,接收单元,用于接收网络簇内的每个节点的运动状态特征信息和传感器特征信息;融合单元,用于分别将网络簇内的每个节点的传感器特征信息转化为一维向量后,将一维向量与运动状态特征信息进行融合,得到每个节点的特征信息。
24、根据本公开的第六方面,提供了一种车路协同自动驾驶感知装置,装置包括:接收单元、广播单元。
25、接收单元,用于接收来自网络簇头的指示信息,指示信息用于指示第一节点为感知簇头,网络簇头为网络簇中的一个节点,网络簇包括至少两个节点,节点包括车辆和/或路侧单元,第一节点为至少两个节点中的一个。
26、广播单元,用于响应于指示信息,按照预设周期广播自身的运动状态信息和传感器信息。
27、根据本公开的第七方面,提供了一种车路协同自动驾驶感知装置,装置包括:接收单元、感知单元。
28、接收单元,用于接收来自网络簇头的指示信息,指示信息用于指示第一节点为感知簇头,网络簇头为网络簇中的一个节点,网络簇包括至少两个节点,节点包括车辆和/或路侧单元,至少两个节点包括第一节点和第二节点。
29、感知单元,用于响应于接收第一节点广播的运动状态信息和传感器信息,根据第一节点广播的运动状态信息和传感器信息、第二节点自身的运动状态信息和传感器信息,进行自动驾驶协同感知。
30、可选地,感知单元,具体用于:第二节点将第一节点广播的运动状态信息和传感器信息转换为第二节点的视角,得到转换视角后的感知信息;第二节点将转换视角后的感知信息与自身的运动状态信息和传感器信息进行融合,得到自动驾驶协同感知信息。
31、根据本公开的第八方面,提供了一种车路协同系统,车路协同系统包括至少两个节点,至少两个节点中包括默认通信节点,节点包括车辆和/或路侧单元。
32、默认通信节点,用于根据自身与周边节点之间的通信距离,构建网络簇,从网络簇内选取通信质量满足第二预设条件的目标节点作为网络簇的网络簇头,网络簇包括至少两个节点。
33、网络簇头,用于根据网络簇内的每个节点的特征信息、节点之间的距离关系,确定网络簇内每个节点的贡献度,贡献度用于指示节点在网络簇内的协同感知能力的大小;从网络簇内选取贡献度满足第一预设条件的第一节点作为感知簇头;向网络簇内的每个节点发送指示信息,指示信息用于指示感知簇头的身份信息,且用于指示感知簇头按照预设周期广播自身的运动状态信息和传感器信息。
34、感知簇头,用于响应于指示信息,按照预设周期广播自身的运动状态信息和传感器信息。
35、网络簇内的每个节点,用于响应于接收到感知簇头广播的运动状态信息和传感器信息,根据感知簇头广播的运动状态信息和传感器信息、自身的运动状态信息和传感器信息,进行自动驾驶协同感知。
36、根据本公开的第九方面,提供了一种电子设备,包括:至少一个处理器;以及与所述至少一个处理器通信连接的存储器;其中,所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行如第一方面至第四方面所述的方法。
37、根据本公开的第十方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使计算机执行根据第一方面至第四方面所述的方法。
38、根据本公开的第十一方面,提供了一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据第一方面至第四方面所述的方法。
39、本公开第五方面至第十一方面所具备的有益效果可以参考第一方面至第四方面所具备的有益效果,不再赘述。
40、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其他特征将通过以下的说明书而变得容易理解。
- 还没有人留言评论。精彩留言会获得点赞!