一种水空两用无人机的通信系统及其操作方法
本发明涉及无人机,特别是一种水空两用无人机的通信系统及其操作方法。
背景技术:
1、水空两用无人机是一种跨介质航行器,兼具无人机和水下机器人得到特性,可以在空中和水下运行,能够跨越水/空界面且持续航行,在复杂路桥检测、海空通信等方面有广泛的应用前景。无人机在空中可以通过无线通信方式传输数据,具有很大的工作范围和传输稳定性,而进入水下运行后,由于无线信号在水中快速衰减,无法使用无线信号通信,限制了水空两栖无人机工作范围,使其无法达到普通无人机在空中的工作范围。因此,实现水空环境下的长距离稳定通信是水空两栖系统发展的关键。
2、目前水下通信主要采用有线通信方法进行通信,线缆传输信号传输速率高、稳定性、实时性好等优势,但线缆长度极大的制约了水下航行设备的工作范围,且容易发生缠绕,灵活性和适应性较差。
技术实现思路
1、针对上述缺陷,本发明的目的在于提出一种水空两用无人机的通信系统,解决现有技术中水空两用无人机的工作范围小、下潜深度浅、且线缆容易发生缠绕的问题。
2、为达此目的,本发明采用以下技术方案:
3、一种水空两用无人机的通信系统,包括无人机本体、水下通信子系统、空中通信子系统和飞行控制器;
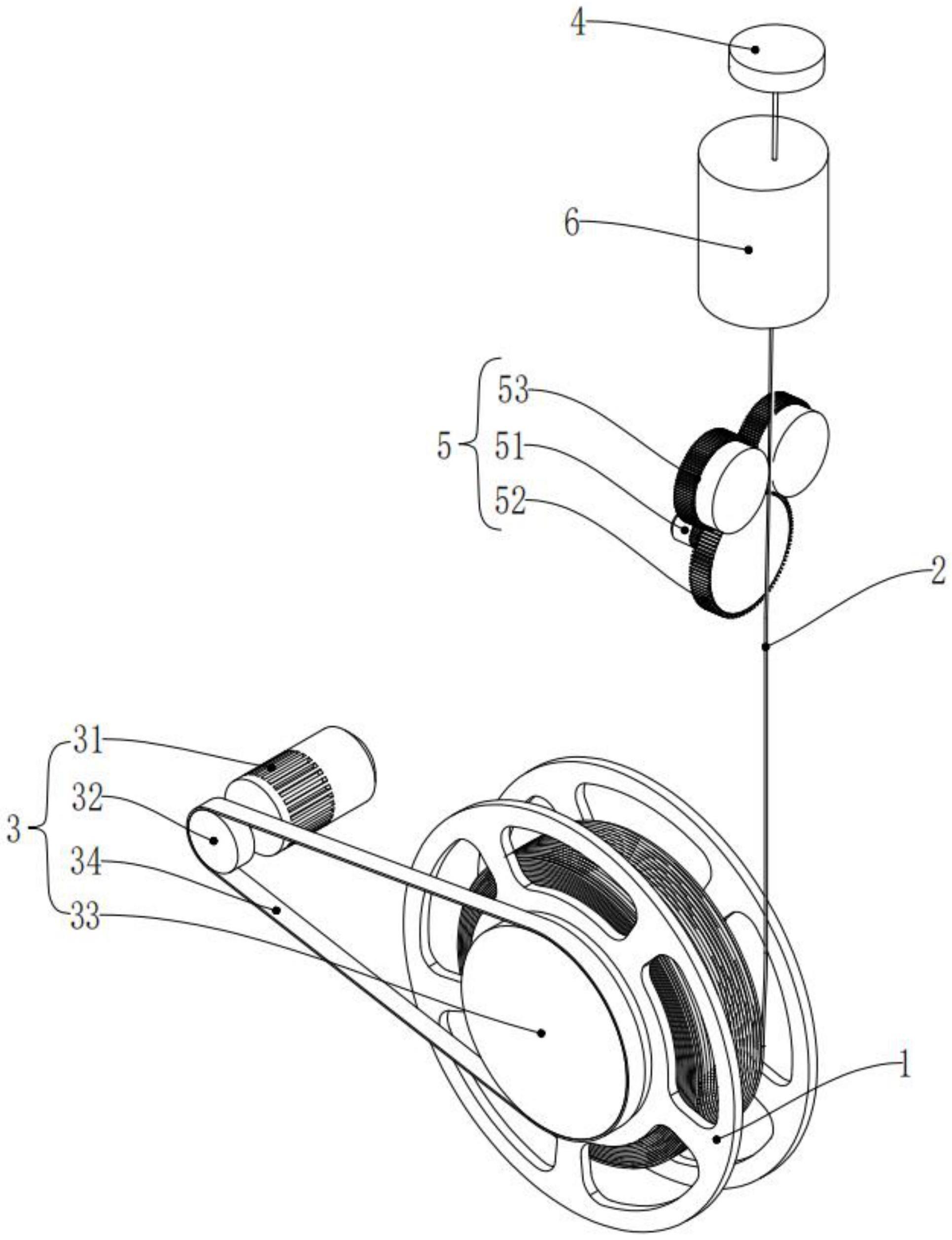
4、所述水下通信子系统包括卷线盘、线缆、卷线盘驱动装置、浮标天线、出线驱动装置、电机驱动模板和信号转换模块,所述卷线盘、卷线盘驱动装置和所述出线驱动装置分别安装于所述无人机本体,所述线缆的固定端与所述飞行控制器电联接,所述线缆的自由端安装有所述浮标天线,且所述线缆卷绕于所述卷线盘;
5、所述电机驱动模块与所述飞行控制器电联接,所述卷线盘驱动装置和所述出线驱动装置分别与所述电机驱动模块电联接,所述电机驱动模块用于控制所述卷线盘驱动装置驱动所述卷线盘的转动;所述出线驱动装置位于所述卷线盘和所述线缆的自由端之间,所述电机驱动模块用于控制所述出线驱动装置放出所述线缆的自由端;所述浮标天线安装有所述信号转换模块,所述信号转换模块与所述飞行控制器通过所述线缆电连接,所述信号转换模块用于与上位机通信连接,所述信号转换模块用于将电信号和无线信号进行相互转换;
6、所述空中通信子系统安装于所述无人机本体,且所述空中通信子系统与所述飞行控制器通信连接。
7、进一步地,所述卷线盘驱动装置包括第一驱动电机、驱动带轮、从动带轮和传动带;
8、所述第一驱动电机的驱动端连接于所述驱动带轮,所述第一驱动电机用于驱动所述驱动带轮转动,所述第一驱动电机与所述电机驱动模块电联接;
9、所述从动带轮与所述卷线盘的转动轴连接,所述驱动带轮和所述从动带轮通过所述传动带传动连接。
10、进一步地,所述出线驱动装置包括第二驱动电机、驱动齿轮和两个出线齿轮;
11、所述第二驱动电机的驱动端连接有所述驱动齿轮,所述第二驱动电机用于驱动所述驱动齿轮转动,所述第二驱动电机与所述电机驱动模块电连接;
12、两所述出线齿轮水平并排设置,且所述线缆由两所述出线齿轮夹持,任一所述出线齿轮的齿轮部与所述驱动齿轮啮合,所述驱动齿轮的转动,带动任一所述出线齿轮的转动,实现对线缆的出线。
13、进一步地,所述的电机驱动模块采用foc电机驱动模块,所述foc电机驱动模块部署有foc控制方法;
14、所述foc控制方法包括分别对所述第一驱动电机和所述第二驱动电机的转速控制、电流控制以及转动方向的控制,同时预设了所述卷线盘的角速度的极限值;所述预设角速度的极限值取决于以下公式:
15、
16、式中w0为预设的卷线盘的旋转角速度的最小速度值;rmax为卷线盘绕满所述线缆时的最大直径;ν0为无人机竖直稳定运动的最小速度。
17、进一步地,当卷线盘的角速度达到预设的极限值时,所述第一驱动电机和第二驱动电机运转时按照阻尼公式所示关系配合工作,公式如下:
18、
19、式中jp(t)为所述卷线盘的转动惯量,随时间和线缆多少状态变化;a是卷线盘的角加速度;在出线时,f是第二驱动电机提供的拉动线缆的力;在收线时,f是第一驱动电机提供的拉动线缆的力;r(t)为卷线盘的线缆的半径,随时间和线缆多少变化;在出线时,mf是第一驱动电机模拟的阻尼作用力;在收线时,mf是第二驱动电机模拟的阻尼作用力;v为无人机竖直方向运动速度,电机驱动模块驱动第二驱动电机使线缆跟随该速度放出;k为驱动带轮和从动带轮的传动比;在出线时,c是第一驱动电机模拟阻尼系数;在收线时,c是第二驱动电机模拟阻尼系数。
20、进一步地,所述空中通信子系统包括摄像头模块、红外接收模块、无线通信模块和无线充电模块;
21、所述红外接收模块用于接收飞行控制器发出的红外信号;
22、所述无线通信模块用于将摄像头模块的摄像头的视频信号发送至上位机,同时接收上位机控制信号发送给飞行控制器;
23、所述无线充电模块用于通过无线方式给空中通信子系统充电;
24、无人机本体进入水下时,所述红外接收模块、摄像头模块和无线通信模块暂停工作。
25、进一步地,所述空中通信子系统采用防水灌封处理方式固定安装于无人机本体的机架。
26、进一步地,还包括水空传感器,所述水空传感器与所述线缆连接,并位与所述浮标条线的下方,所述水空传感器用于判断通信系统处于液体介质或空气介质中,所述水空传感器与飞行控制器电连接。
27、优选地,所述第一驱动电机和所述第二驱动电机均采用永磁同步电机,所述电机驱动模块通过can总线与所述飞行控制器连接;所述通信系统处于空气介质中时,所述电机驱动模块的下三桥全部导通,所述电机驱动模块的上三桥全部断开,所述水下通信子系统暂停工作。
28、一种水空两用无人机的通信系统的操作方法,应用于上述所述的一种水空两用无人机的通信系统,包括如下步骤:
29、(1)当无人机在空中飞行时,空中通信子系统工作,水下通信子系统休眠,空中通信子系统通过所述摄像头模块获取外界环境信息,并通过所述无线通信模块将视频信号发送给飞行控制器和上位机;
30、(2)当无人机进入水下航行时,飞行控制器根据所述水空传感器发出的信号自动判断所处介质改变,并发出控制信号,所述空中通信子系统接收飞行控制器发送的红外信号进入休眠,所述水下通信子系统开始工作;
31、(3)所述浮标天线与所述无人机本体通过线缆连接,通过所述线缆传输电源信号、视频信号和控制信号;同时将所述线缆传输的电信号和无线信号通过所述信号转换模块进行互相转换,实现飞行控制器与上位机的通信;所述电机驱动模块通过can总线与飞行控制器进行通信,接收到飞行控制器的数据后,驱动所述第一驱动电机和所述第二驱动电机旋转;
32、(4)对所述第一驱动电机预设最小转速,当所述卷线盘转速小于预设的速度值时,所述第一驱动电机驱动所述卷线盘加速转动;当所述卷线盘的转速达到预设的速度值时,改为控制驱动所述第一驱动电机的电流,控制输出扭矩;
33、(5)当无人机在水下下潜时,所述第一驱动电机与所述第二驱动电机配合工作;所述第二驱动电机的转速跟随无人机的运动速度;在所述卷线盘未达到预设旋转角速度时,所述第一驱动电机驱动所述卷线盘转动;在所述卷线盘转速达到预设速度后所述第一驱动电机模拟阻尼,避免所述卷线盘转动过度;
34、(6)当所述无人机在水下上升时,所述第一驱动电机和所述第二驱动电机配合工作;所述第一驱动电机跟随无人机的运动速度;在所述卷线盘未达到预设的角速度时,所述第二驱动电机保持跟随转动;在所述卷线盘达到预设速度后,所述第二驱动电机模拟阻尼作用,保持卷线盘到出线驱动装置之间的线缆张紧,避免线缆缠绕;
35、(7)当无人机从水下飞出水面进入到空中时,飞行控制器判断无人机所处介质改变并发送控制信号,所述空中通信子系统接收飞行控制器发送的红外信号进入工作,所述水下通信子系统进入休眠,完成工作模式切换。
36、本发明提供的技术方案可以包括以下有益效果:
37、在水下工作时,通过电机驱动模块控制所述卷线盘驱动装置驱动所述卷线盘的转动,使缠绕于所述卷线盘上的线缆进行放线的同时所述电机驱动模块控制所述出线驱动装置将所述线缆的自由端放出,不会使线缆发生缠绕或混乱,所述线缆的自由端安装有所述浮标天线,所述浮标天线安装有所述信号转换模块进而实现飞行控制器和上位机的通信,通过线缆进行放线,可以实现更深的下潜深度,保证了水下时的通信距离,扩大了在水下工作时无人机的工作范围,从而解决现有技术中水空两用无人机的工作范围小、下潜深度浅、且线缆容易发生缠绕的问题。
- 还没有人留言评论。精彩留言会获得点赞!