一种大型矿区无人驾驶矿车调度数据智能管理方法与流程
本发明涉及图像通信,具体涉及一种大型矿区无人驾驶矿车调度数据智能管理方法。
背景技术:
1、无人驾驶矿车被广泛应用在各种领域,例如大型矿区中的无人驾驶矿车。为了保证无人驾驶矿车的作业效率,需要将调度数据传输至调度中心,用于实时监控车辆情况,从而优化车辆的运输路线。
2、为确保车辆监控的实时性和准确性,需要对调度数据进行压缩传输。无损压缩能够完整保留调度数据的所有信息,数据精度高,但是压缩效率低,使得通信效率低;而有损压缩的压缩效率高,确保了通信效率,但是会导致调度数据的部分信息丢失,影响调度数据的精度;所以现有压缩方法无法兼顾调度数据的精度与通信效率。
技术实现思路
1、为了解决上述问题,本发明提供一种大型矿区无人驾驶矿车调度数据智能管理方法:
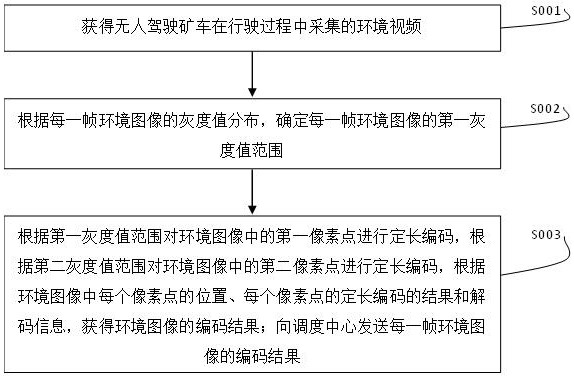
2、获得无人驾驶车辆在行驶过程中采集的环境视频;
3、针对环境视频中的每一帧环境图像,根据环境图像的灰度值分布,确定第一灰度值范围;
4、根据第一灰度值范围对环境图像中的第一像素点进行定长编码,第一像素点为灰度值在第一灰度值范围中的像素点;
5、根据第二灰度值范围对环境图像中的第二像素点进行定长编码,第二像素点为灰度值不在第一灰度值范围中的像素点,第二灰度值范围包含第一灰度值范围;
6、根据环境图像中每个像素点的位置、每个像素点的定长编码的结果和解码信息,获得环境图像的编码结果,所述解码信息包括第一定长编码长度、第二灰度值范围的下限和上限以及第一灰度值范围的下限;
7、向调度中心发送每一帧环境图像的编码结果。
8、优选地,所述根据环境图像的灰度值分布,确定第一灰度值范围,包括:
9、将环境图像划分为多个图像块;
10、根据多个图像块的灰度值分布,确定第一定长编码长度;
11、针对每个图像块,根据第一定长编码长度和图像块的灰度值分布,确定该图像块的第一灰度值范围;
12、所述根据第一灰度值范围对环境图像中的第一像素点进行定长编码,第一像素点为灰度值在第一灰度值范围中的像素点,包括:
13、根据每个图像块的第一灰度值范围,对该图像块中的第一像素点进行定长编码,该图像块中的第一像素点为灰度值在该图像块的第一灰度值范围中的像素点;
14、所述解码信息包括第一定长编码长度、第二灰度值范围的下限和上限以及第一灰度值范围的下限,包括:
15、解码信息包括第一定长编码长度、第二灰度值范围的下限和上限、图像块的边长以及每个图像块的第一灰度值范围的下限。
16、优选地,所述根据多个图像块的灰度值分布,确定第一定长编码长度,包括:
17、针对每个图像块,根据图像块中的最小灰度值和最大灰度值,确定图像块的第三灰度值范围;
18、根据所有图像块的第三灰度值范围的大小的平均值,确定第一定长编码长度。
19、优选地,所述第一定长编码长度的计算公式包括:
20、
21、式中,b表示第一定长编码长度,表示所有图像块的第三灰度值范围的大小的平均值,表示以2为底的对数函数,表示向上取整。
22、优选地,所述根据第一定长编码长度和图像块的灰度值分布,确定该图像块的第一灰度值范围,包括:
23、根据第一定长编码长度,确定第一灰度值范围的大小;
24、若图像块的第三灰度值范围的大小小于或者等于第一灰度值范围的大小,则确定该图像块的第一灰度值范围的下限为图像块中的最小灰度值;
25、若图像块的第三灰度值范围的大小大于第一灰度值范围的大小,则针对图像块的第三灰度值范围内的每个灰度值,确定以该灰度值作为第一灰度值范围的下限时,所述图像块内灰度值在所述第一灰度值范围内的像素点的数量;确定第三灰度值范围内能够使得第一灰度值范围中包含的像素点的数量最多的灰度值为该图像块的第一灰度值范围的下限;
26、根据图像块的第一灰度值范围的下限和第一灰度值范围的大小,确定图像块的第一灰度值范围。
27、优选地,所述第一灰度值范围的大小的计算公式包括:
28、
29、式中,f表示第一灰度值范围的大小,b表示第一定长编码长度。
30、优选地,所述将环境图像划分为多个图像块,包括:
31、将环境图像划分为多个边长为k的图像块,k取遍预设边长取值范围中的所有整数;
32、所述方法还包括:
33、针对不同取值的k,在获得k对应的第一定长编码长度和每个边长为k的图像块的第一灰度值范围后,根据第一定长编码长度、第二灰度值范围的第二定长编码长度和每个边长为k的图像块的第一灰度值范围,确定k对应的编码数据量;
34、确定对应的编码数据量最小的k为最优边长;
35、所述根据每个图像块的第一灰度值范围,对该图像块中的第一像素点进行定长编码,包括:
36、根据每个图像块的目标灰度值范围,对该图像块中的第一像素点进行定长编码,所述目标灰度值范围为根据所述最优边长确定的第一灰度值范围;
37、所述解码信息包括第一定长编码长度、第二灰度值范围的下限和上限、图像块的边长以及每个图像块的第一灰度值范围的下限,包括:
38、解码信息包括第一定长编码长度、第二灰度值范围的下限和上限、图像块的最优边长以及每个图像块的目标灰度值范围的下限。
39、优选地,所述根据第一定长编码长度、第二灰度值范围的第二定长编码长度和每个边长为k的图像块的第一灰度值范围,确定k对应的编码数据量,包括:
40、
41、式中,表示k对应的编码数据量,表示k对应的第一定长编码长度,表示边长为k的图像块的数量,表示边长为k的所有图像块中第i个图像块内灰度值在第i个图像块的第一灰度值范围内的像素点的数量,c表示第二灰度值范围的第二定长编码长度。
42、优选地,所述根据环境图像中每个像素点的位置、每个像素点的定长编码的结果和解码信息,获得环境图像的编码结果,包括:
43、在每个第二像素点的定长编码的结果前面添加标识编码,所述标识编码用来标记第二像素点;
44、环境图像中每个像素点的定长编码的结果、每个第二像素点的定长编码的结果前面添加的标识编码和解码信息,组成环境图像的编码结果。
45、优选地,所述第二灰度值范围,包括:
46、根据环境图像中的最小灰度值和最大灰度值,确定第二灰度值范围。
47、本发明的技术方案的有益效果是:本发明根据环境图像的灰度值分布,确定第一灰度值范围,对于灰度值在第一灰度值范围中的像素点,根据第一灰度值范围进行定长编码,缩短定长编码的编码长度,提高通信效率,对于灰度值不在第一灰度值范围中的像素点,根据第二灰度值范围进行定长编码,第二灰度值范围包含第一灰度值范围,保证调度数据的数据精度,实现在保证调度数据的数据精度的同时提高调度数据的通信效率。
- 还没有人留言评论。精彩留言会获得点赞!