应用于城市复杂建筑的UWB无基站应急定位系统的制作方法
本发明属于通信,具体涉及一种应用于城市复杂建筑的uwb无基站应急定位系统。
背景技术:
1、城市复杂建筑是指高层、地下、大型综合体等建筑,此类建筑往往因为结构复杂,对信号屏蔽和衰减严重,造成内部存在大量通信盲区。随着社会经济不断发展,高层、地下建筑、超大综合体建筑大量涌现,给通信保障和消防员安全管控带来巨大压力和挑战,特别是在开展城市复杂建筑灭火救援时,现场指挥员不能有效掌握内攻人员的所在位置和生命体征,现场音视频信号覆盖存在盲区,通信指挥秩序混乱等问题,一直未有效解决。围绕破解“内攻定位难、通信覆盖难、指挥秩序乱”等现场联合作战难题,需要优化现场安全管控手段、提高复杂环境通信覆盖能力、快速实现大型现场组网,尤其是利用室内精准定位技术,将救援人员内攻定位精度优化到1米以内,利用生命体征监测、三维快速建模等技术,使现场指挥员实时掌握单兵和班组的所在位置、生命体征、行动轨迹,有效降低作战安全风险。
2、室外定位技术主要借助于全球导航卫星系统(global navigation satellitesystem,gnss),利用卫星和移动对象之间的直接通信,可完成精确定位。而对于室内场景,gnss信号易受遮挡,无法实现定位。高精度室内定位技术可以分为两类:第一类为基于外置信源的室内定位技术,这类技术的实现依赖于外置信源,主要包括wifi、蓝牙、超宽带(ultra-wide bandwidth,uwb)、蜂窝移动网络、伪卫星等;第二类为基于天然信源的室内定位技术,这类技术仅依靠终端的传感器即可实现定位,包括惯性导航、地磁导航等。综合考虑应用场景、定位精度、成本、重量、体积、可穿戴性等因素,室内精准定位技术能将救援人员内攻定位精度达到到1米以内的优选uwb技术,比如发明专利cn116723569a支持应急通信的多模定位方法及系统,发明专利cn116233035a一种数字化消防单兵通信系统及数据感知采集通信方法。但是,通常在使用uwb定位系统时,需要架设uwb基站,标定出uwb基站坐标,建立uwb基站坐标系后,才能对uwb标签(救援人员携带的uwb标签)进行相对定位。由于应急救援时机的紧迫性、uwb基站覆盖范围的局限性、救援人员活动区域的未知性等因素,限制了有基站的uwb定位系统的应用。
技术实现思路
1、鉴于以上存在的问题,本发明提供一种应用于城市复杂建筑的uwb无基站应急定位系统。
2、为解决上述技术问题,本发明采用如下的技术方案:
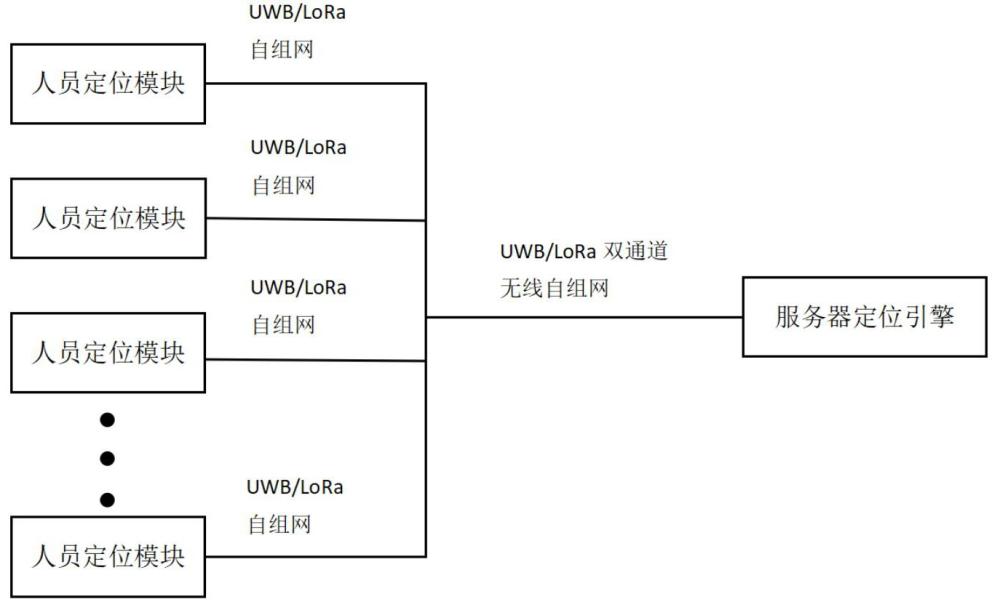
3、一种应用于城市复杂建筑的uwb无基站应急定位系统,包括服务器定位引擎和若干人员定位模块,服务器定位引擎和若干人员定位模块通过uwb/lora自组网互联,其中所述人员定位模块进一步包括mcu、uwb芯片、lora芯片、北斗定位芯片、高度计芯片、蓝牙通信芯片和电源管理电路;所述服务器定位引擎用于利用uwb/lora双通道接收到各人员定位模块发送的北斗定位信息、高度计信息、生命体征信息和uwb测距信息,进行无基站相对定位和绝对定位;每个人员定位模块占用第一时隙,将所有的人员定位模块占用的第一时隙总和为测距周期进行uwb测距得到测距结果。
4、一种可能的实施方式中,所述服务器定位引擎包括建立相对坐标系、相对坐标解算和绝对坐标解算,具体地:
5、每个测距周期,服务器定位引擎收到各个人员定位模块各自传来的测距信息,每帧测距信息中,包含该模块与其它互相测距的人员定位模块的id号、距离值,由于模块分布区域不同,各自能够互相测距的模块数量不同,将其定义为各人员定位模块的朋友圈个数不同;
6、每个测距周期,根据朋友圈个数,对各人员定位模块id进行排序,选择第一个模块为朋友圈个数最多的模块,作为二维虚拟坐标的原点(0.0,0.0),然后根据排序依次选择第二个模块、第三个模块,并且这三个模块符合互联互通;由第二个模块确定虚拟坐标的x轴,比如第一模块与第二模块测距值为m米,第二个模块的坐标为(m,0.0);以(0.0,0.0)为圆心,以第一个模块和第三个模块的距离值为半径做一个圆;以(m,0.0)为圆心,以第二个模块和第三个模块的距离值为半径做另一个圆;两个圆相交出现两交点,选y坐标为正的交点作为第三个模块的坐标(x3,y3);
7、由朋友圈个数排序优选的第一个模块、第二个模块、第三个模块构成一个虚拟坐标系,按朋友圈个数排序,根据三圆相交法,依次算出与这三个模块互联互通的模块的坐标值,网络中有相对坐标值的节点数目逐步增加;
8、遍历尚未求出相对坐标值的节点,判断其朋友圈中有坐标值的模块数量是否大于等于3,如果成立,利用朋友圈中模块的坐标值,推算该节点的坐标,进行网络节点的蔓延;
9、判断相对定位网络中的节点,是否有北斗定位值,如果有北斗定位值,引入到相对定位网络中,根据平面坐标与经纬度坐标的转换关系,推算出整个网络的绝对坐标;
10、每个测距周期,服务器定位引擎把包括北斗定位信息、高度计信息、生命体征信息的信息补充到相对定位网络节点中,如果遇到安全报警信息,第一时间进行报警;并且,把网络节点信息发送给上一级应用层服务器。
11、一种可能的实施方式中,在服务器定位引擎的软件实现过程中,利用多线程技术;一个主进程进行包括数据解析、数据处理、数据存储和人机交互界面的实现;一个线程用于串口数据的接收,lora/uwb通信数据都是转串口数据发送给服务器定位引擎;一个线程用于网络节点定位的可视化,利用easyx图形库进行图形化显示。
12、一种可能的实施方式中,所述测距过程进一步包括自适应的异步时钟条件下的时隙分配。
13、一种可能的实施方式中,所述自适应的异步时钟条件下的时隙分配具体包括:
14、人员定位模块一键开机,设模块id为m,首先打开uwb接收机侦听一个测距周期的时间,判断测距周期内有没有其它人员定位模块发出pool-a信息,如果收到其它模块的pool-a信息,设模块id为n,立刻记录两个时间值,一个为mcu芯片的系统当前时间值,一个为uwb接收时间戳值;若一个测距周期内没有收到任何模块的pool-a信息,以一个测距周期为周期发送pool-a信息;
15、id为m的人员定位模块嵌入式程序利用状态机进行流程控制,在状态机中获取arm芯片当前计时值t,当t大于等于t_pool时候,状态机切换到发送pool-a信息,t_pool值按一个测距周期进行累加;
16、id为m的人员定位模块在不属于自己发起pool-a的时隙时,每次收到pool-a信息,利用外部模块id号推算自己t_pool值,如果利用外部推算值和内部测距周期值相差大于50ms,利用外部推算值进行修正t_pool值。
17、一种可能的实施方式中,所述测距过程进一步包括利用uwb定位芯片时间戳进行uwb通信测距。
18、一种可能的实施方式中,所述利用uwb定位芯片时间戳进行uwb通信测距具体包括:
19、其中一个人员定位模块在它的第一时隙发起pool-a,并且记录uwb定位芯片发射时间戳;其它模块收到pool-a,各自记录接收到pool-a的本地时间戳t2,计算出自己将要回复消息的本地时间戳t_resp,各人员定位模块按id号依次回复消息,间隔为自定义的间隔时间;
20、当其它人员定位模块的时间戳t_resp时间到,uwb发射机进行回复消息,回复消息中包含该模块接收到pool-a的时间戳和回复消息的发射时间戳;
21、发起pool-a的模块接收到另一个人员定位模块的回复消息,获取到本地接收消息的时间戳,并且通过解包回复消息,获得回复消息模块的两个时间戳;发起pool-a的模块与回复消息的人员定位模块的一次双向通信,发起pool-a的人员定位模块得到了4个时间戳;
22、按每个模块间隔2ms回复,接收到所有其它人员定位模块的回复消息后再次发起pool-b,发起pool-b的模块与回复消息的人员定位模块的一次双向通信,发起pool-b的人员定位模块又得到了4个时间戳;
23、在发起pool-a模块的第一时隙内,发起的模块与它相互通信的各个模块都获得8个时间戳,利用8个时间戳,进行双边双向测距,计算出模块间的距离;
24、将发起pool-a的模块在第一时隙内与各模块的测距结果打包组帧,通过uwb/lora双通道发送给服务器定位引擎。
25、一种可能的实施方式中,人员定位模块由人员随身携带。
26、一种可能的实施方式中,人员定位模块集成到人员头盔中。
27、采用本发明具有如下的有益效果:定位不需要uwb基站,一键开机、操作简单;uwb无基站定位模块,具备轻型化、模块化、集成化的特点,可集成于消防员的头盔中,模块的测距通信范围超过千米,并且信号穿透能力强,提高了系统在灾害事故现场的可用性;服务器定位引擎端能实时展现内攻队员的队形,定位精度优于1米,实时检测队员的生命体征,当队员出现危险状况时,第一时间报警,指导周围临近队友进行搭救,提升了消防员作战安全管控效能。
- 还没有人留言评论。精彩留言会获得点赞!