一种具有二自由度射击云台的全向移动射击机器人
1.本实用新型涉及射击机器人技术领域,更具体的,一种具有二自由度射击云台的全向移动射击机器人。
背景技术:
2.移动射击机器人已经广泛用于机器人竞赛、物料投放、娱乐和体育训练等领域。现有射击机器人一般由云台和底盘两个部分组成,云台部分包括发射装置和图像传输系统等,发射装置多采用摩擦发射,云台通过支撑板安装在底盘上,通过驱动电机实现云台与底盘、发射装置之间的相对转动,底盘部分多采用具备全方位移动能力的麦克纳姆轮底盘。
3.但现有移动射击机器人由于yaw轴采用电机而产生较大的振动和惯性,在俯仰和偏航两个自由度一起运作的情况下,发射弹丸过程中一方面方向难以控制,射击命中率不高,另一方面容易卡弹,尤其是存在大量弹丸时,还会导致发射装置的堵塞、弹丸卡死,不仅影响了正常使用,而且还会对发射装置造成损坏,存在一定的安全隐患。
4.同时,现有移动射击机器人的发射装置多采用摩擦轮和供弹链路配合发射弹丸,影响了弹丸发射的连续性。
技术实现要素:
5.本实用新型的目的是解决上述问题,提供一种具有二自由度射击云台、射击精度高、可连续性射击、操控性能好、可全向移动的射击机器人。
6.为解决上述技术问题,本实用新型的技术方案是:一种具有二自由度射击云台的全向移动射击机器人,包括发射装置、云台、底盘、主控板和检测模块,所述发射装置、云台和底盘从上到下依次安装,所述发射装置安装在云台顶部,且发射装置的外侧安装有舵机和传感器,所述云台通过云台支撑板安装到底盘上,所述主控板和检测模块安装在底盘上,且主控板和检测模块分别位于云台两侧,云台具有两个自由度,云台与底盘均可旋转。
7.所述发射装置包含弹舱、发射管、摩擦轮、加速轨道、拨盘、拨轮和拨弹片,所述弹舱位于拨盘的正上方,所述拨轮安装在拨盘中心位置,通过拨盘内部安装的拨盘电机控制拨轮旋转,所述拨弹片安装在拨盘的壁面上,所述拨盘的下部连接加速轨道,所述加速轨道的两侧设有摩擦轮,加速轨道最外侧与发射管相连。
8.所述云台包括云台侧板、云台支撑板、同步带轮、pitch轴电机、yaw轴电机以及交叉滚子轴承,电机均为直流无刷电机,所述云台侧板位于云台的两侧分为云台左侧板和云台右侧板,所述同步带轮分别为同步大带轮和同比小带轮,所述同步大带轮设置于云台右侧板的顶部,所述同比小带轮设置于云台右侧板的下部,所述云台右侧板的中部偏下处设有惰轮,所述惰轮通过惰轮安装板进行固定,所述yaw轴电机位于云台侧板之间,且通过带轮肩部法兰与同比小带轮连接,所述交叉滚子轴承和尼龙电盘安装在云台侧板和云台支撑板之间,所述pitch轴电机安装在云台支撑板的下部与交叉滚子轴承连接。
9.所述底盘的车架采用四轮平行配置的悬挂结构,所述车架下端的悬挂机构包括麦
克纳姆轮、减震器、电机支座和麦轮电机,所述麦克纳姆轮通过安装在电机支座上的麦轮电机固定在电机支座中间,所述电机支座的一端与减震器铰接,所述减震器的上端铰接有连接车架底部的铰支座一,所述电机支座的另一端铰接有连接车架底部的铰支座二。
10.所述 yaw轴电机控制俯仰角方向的旋转与转速,所述pitch轴电机控制偏航角方向的旋转与转速,两个电机形成两个自由度,传感器作为反馈调节部件将控制状况反馈于主控板。
11.所述拨盘的壁面上开有拨弹片配合口,所述拨盘的中心位置设有拨盘电机安装螺纹,所述拨盘内腔设有可容纳一个弹丸的光滑弧廓,所述拨盘的下部设有出弹口。
12.所述拨盘、拨轮和拨弹片组成拨弹机构,所述拨轮设有八根拨柱,每根拨柱旁边有一个内凹弧;所述拨弹片纵向安装,能够将弹丸一个个填装到弧形内凹孔内,实现均匀分弹。
13.所述传感器能够检测弹丸的发射速度和数量以及云台的偏转角度和角加速度,其将收集的信息发送给主控板。
14.所述主控板和检测模块构成闭环控制系统,控制整机的移动、旋转和发射功能,包括各轴电机的转动角度、角加速度,摩擦轮、拨盘、同步带轮、舵机和麦克纳姆轮的转速。
15.与现有技术相比,本实用新型具有如下的优点和效果:
16.(1)降低了控制yaw轴的电机高度而采用步带轮传动的方式,显著降低了整体的重心,机器人移动的平稳性大大增加。
17.(2)采用弹舱和发射装置直连的方式,使弹丸发射连续平稳,速度均匀。
18.(3)可以对四周环境的无死角追踪与打击,同时提高机器人关键部件闪避攻击的能力,结构简单,适用范围广。
附图说明
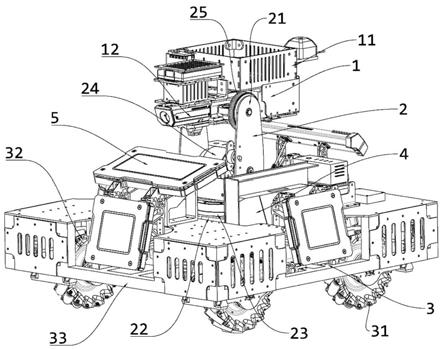
19.图1是本实用新型全向移动射击机器人结构图;
20.图2是本实用新型云台和发射装置轴测图;
21.图3是本实用新型发射装置无弹舱轴测结构图,
22.图4是本实用新型发射装置无弹舱俯视结构图;
23.图5是本实用新型发射管和摩擦轮结构图;
24.图6是本实用新型发射装置的拨盘结构图;
25.图7是本实用新型发射装置的拨轮结构图;
26.图8是本实用新型云台结构图;
27.图9是本实用新型底盘的车架结构图;
28.图10是本实用新型底盘的全向移动轮结构图。
29.附图标记说明:1、发射装置,2、云台,3、底盘,4、主控板,5、检测模块,11、弹舱,111、舵机,12发射管,121、传感器,13、摩擦轮,14、加速轨道,15、拨盘, 151、拨盘电机安装螺纹,152、出弹口,153、拨弹片配合口,16、拨轮,17、拨弹片,21、云台侧板,211、云台左侧板,212、云台右侧板,22、云台支撑板,23、pitch轴电机,24、yaw电机,25、同步带轮,251、同步大带轮,252、同步小带轮,253、惰轮,254、惰轮安装板,255、带轮肩部法兰,26、交叉滚子轴承,31、麦克纳姆轮,311、麦轮电机,32、减震器,321、铰支座一,33、车架,34、电机支座,
341、铰支座二。
具体实施方式
30.下面结合附图和具体实施例对本实用新型进一步说明。
31.如图1所示,一种具有二自由度射击云台的全向移动射击机器人,包括发射装置1、云台2、底盘3、主控板4和检测模块5,所述发射装置1、云台2和底盘3从上到下依次安装,所述发射装置1安装在云台2顶部,且发射装置1的外侧安装有舵机111和传感器121,所述云台2通过云台支撑板22安装到底盘3上,所述主控板4和检测模块5安装在底盘3上,云台2具有两个自由度,云台2与底盘3均可旋转。
32.如图2所示,发射装置1和云台2装配成一个具有二自由度的射击云台,云台底部的pitch电机23控制偏航角,中部的yaw轴电机24控制俯仰角,因此形成两个自由度,向四周全方位的发射弹丸。
33.如图2到图7所示,所述发射装置1包含弹舱11、发射管12、摩擦轮13、加速轨道14、拨盘15、拨轮16和拨弹片17,弹丸发射前,从弹舱11进入拨盘15,拨轮16被拨盘电机控制旋转,弹丸经拨弹片17后被均匀装入弧形内凹孔中,实现均匀装弹,弹丸在拨盘15的出弹口152进入加速轨道14,两边的摩擦轮13形成摩擦力,对弹丸进行加速,并且根据摩擦轮13转速,控制弹丸的速度范围,最终弹丸从发射管12射出。
34.弹舱11为长方体内腔,能够装填弹丸,通过舵机111在水平方向上旋转开闭弹舱盖,摩擦轮13的材质为聚氨酯,所述拨弹片17安装在拨弹片配合口153处,并在纵向进行分弹,所述拨轮安装在拨轮电机安装螺纹151处,并且转速均匀。
35.图5所示,加速轨道14的两侧对称地开设有缺口,且发射管两侧缺口处对称地安装摩擦轮13,摩擦轮13由安装在摩擦轮13底部的摩擦轮电机驱动两个摩擦轮13反向高速旋转,通过摩擦挤压,加速弹丸。传感器121用于检测弹丸的发射速度和数量以及云台2的角度和角加速度,并反馈于主控板4。
36.如图1和图8所示,云台包括云台支撑板22、云台侧板21、同步大带轮251和小带轮252和两个自由度上的电机,电机均为直流无刷电机,所述云台侧板21位于云台2的两侧分为云台左侧板211和云台右侧板212,所述同步带轮25分别为同步大带轮251和同比小带轮252,所述同步大带轮251设置于云台右侧板212的顶部,所述同比小带轮252设置于云台右侧板212的下部,所述云台右侧板212的中部偏下处设有惰轮253,所述惰轮253通过惰轮安装板254进行固定,所述yaw轴电机24位于云台侧板21之间,且通过带轮肩部法兰255与同比小带轮252连接,所述交叉滚子轴承26安装在云台侧板21和云台支撑板22之间,所述pitch轴电机23安装在云台支撑板22的下部与交叉滚子轴承26连接,增加偏航角的旋转时的顺滑度;同步大带轮251和小带轮252的对称面重合安装在云台的一侧,惰轮253通过旁边的惰轮安装板254的配合,增加传送带的张紧力与整体的平稳性,同时增加整机的寿命。
37.如图9和图10所示,所述底盘3的车架33采用四轮平行配置的悬挂结构,所述车架33下端的悬挂机构包括麦克纳姆轮31、减震器32、电机支座34和麦轮电机311,所述麦克纳姆轮31通过安装在电机支座34上的麦轮电机311固定在电机支座34中间,所述电机支座34的一端与减震器32铰接,所述减震器32的上端铰接有连接车架33底部的铰支座一321,所述电机支座34的另一端铰接有连接车架33底部的铰支座二341。
38.本领域的技术人员将会意识到,这里所述的实施例是为了帮助读者理解本实用新型的原理,应被理解为本实用新型的保护范围并不局限于这样的特别陈述和实施例。本领域的技术人员可以根据本实用新型公开的这些技术启示做出各种不脱离本实用新型实质的其它各种具体变形和组合,这些变形和组合仍然在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1